Project Chrono¶
Background¶
Physics simulator organized as a set of modules that has a high-fidelity HMWWV model validated using Adams.
Install¶
Get the IRRlicht engine¶
Make sure that you have the required files:
sudo apt-get install cmake-extras cmake-qt-gui build-essential xorg-dev freeglut3-dev
After `downloading <http://irrlicht.sourceforge.net/?page_id=10`_ unzip:
sudo unzip /home/febbo/Downloads/irrlicht-1.8.4.zip -d /opt/irrlicht
Compile the Irrlicht Engine 1.8.4 as a shared lib:
/opt/irrlicht/irrlicht-1.8.4/source/Irrlicht$ sudo make sharedlib
/opt/irrlicht/irrlicht-1.8.4/source/Irrlicht$ sudo make install
Chrono¶
Go into /opt folder:
sudo mkdir chrono
cd chrono
sudo mkdir chrono_source
sudo mkdir chrono_build
cd chrono_source
Clone the develop branch into the /opt/chrono/chrono_source directory:
sudo git clone -b develop https://github.com/projectchrono/chrono.git
cd chrono
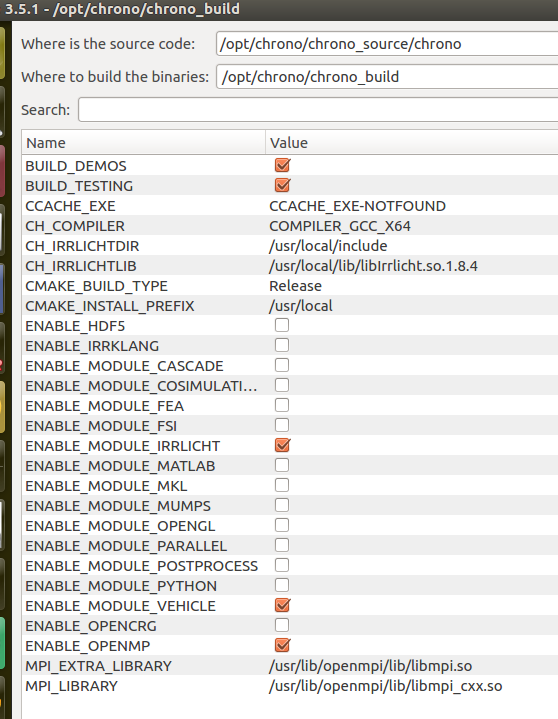
To configure:
sudo cmake-gui
Then to build (assuming ninja was used) go into the build directory and type:
chrono/chrono_build$ sudo ninja
Then you can modify permissions if desired:
sudo chmod -R 777 chrono_build/
The rest is old….¶
Issues:¶
Issue might look something like:
/build$ ninja
[1/2] Building CXX object demo_Steerin....dir/demo_VEH_SteeringController.cpp.o
FAILED: /usr/bin/c++ -MMD -MT demo_SteeringController/CMakeFiles/demo_SteeringController.dir/demo_VEH_SteeringController.cpp.o -MF demo_SteeringController/CMakeFiles/demo_SteeringController.dir/demo_VEH_SteeringController.cpp.o.d -o demo_SteeringController/CMakeFiles/demo_SteeringController.dir/demo_VEH_SteeringController.cpp.o -c /home/febbo/Documents/workspace/tutorials/chrono_tutorials/source/demo_SteeringController/demo_VEH_SteeringController.cpp
/home/febbo/Documents/workspace/tutorials/chrono_tutorials/source/demo_SteeringController/demo_VEH_SteeringController.cpp:22:37: fatal error: chrono/core/ChFileutils.h: No such file or directory
compilation terminated.
ninja: build stopped: subcommand failed.
https://github.com/projectchrono/chrono/issues/79
In this case, copy the Resources ==========
OLD¶
NOT NEEDED:
make a build directory:
src/Chrono_Gazebo/gazonoVehicle$ sudo mkdir build
set up build environment:
src/Chrono_Gazebo/gazonoVehicle$ sudo cmake CMakeLists.txt
make:
git clone git://git.code.sf.net/p/libosmscout/code libosmscout-code
TEMP¶
gazonoVehicle.cc
//gazebo_ros includes NOTE because ros is not in usr/include/ there are sourcing issues #include <ros/callback_queue.h> #include <ros/subscribe_options.h> #include <ros/ros.h> #include “boost/thread/mutex.hpp” #include <std_msgs/Float64.h>
Issue:
/usr/bin/ld: cannot find -lpthreads
https://stackoverflow.com/questions/30600978/cpp-usr-bin-ld-cannot-find-lnameofthelibrary